イノベーションとアントレプレナーシップを推進する産学連携本部 次の10年の始まり
太古のシルクロード上の街が現代に移されたかのように、東京大学はアイデアが交換され、イノベーションが起きる中心地となっています。産と学の巡礼者と商人が、最先端の知識や装置、そして最高の共同研究者を探し求め、世界中からここに集まります。このような豊富なリソースへの門戸を開いているのは、東京大学産学連携本部です。その任務は学術界と産業界の連携を促進すること。アイデアの相互作用や国際化、起業化を通して、産学連携本部は東京大学から産まれた「行商の品」を世界中に広めるために、次世代の精力的なリーダーや問題解決者を育成しています。
社会の利益のための産学連携
数多くの組織、プログラム、そして共同研究を通して、産学連携本部 (図1) は東京大学から産まれた研究の果実が確実に産業や社会と共有されるよう努めています。「産学連携本部は、学術界と産業界をつないでいます。東京大学の研究者と世界中の研究者が、新しい知識を共に創造し、社会のための新たなサービスと製品に貢献できるプラットフォーム作りを目指しています」と語るのは産学連携本部イノベーション推進部長の各務茂夫教授。

図1:産学連携本部プラザ。産学連携本部と東京大学の他の産業関連の組織が入居する。
© 2015 The University of Tokyo.
産学連携本部の強みの一つは、才能溢れる大学研究者の野心と産業界のゴールを繋げ、研究者とスポンサー企業間の密な関係を築くことです。5,800人を超える研究者(大学院生を除く)と、その大半が民間セクターとの共同で行われている1,600以上の共同研究プロジェクトを抱える大学にとって、産と学を結びつけるのは決して容易ではありません。「1,600という数字は日本の大学全体における、産学共同の研究プロジェクトの約10%です」と、イノベーション推進部の筧一彦博士は言います。 「しかし人と人を繋ぐだけでは十分と言えません。Proprius21 のような仕組みを通して、共同研究の成功を確実にするようにしています。Proprius21は、共同研究プロジェクトを作り上げるためのスキームです」。産学連携本部がアメリカの多国籍企業ボーイング社と東京大学の研究者を引き合わせたのもその一例です。
ボーイング社-東京大学のプロジェクトは2010年よりボーイング社の助成を受けて、プロジェクトの進捗を筧博士や産学連携本部の職員が支え、指揮を石川正俊教授がとり、現場での日々の指導をカーソン・レノツ特任講師が行っていました。数ヶ月後、当時工学系研究科の大学院生でアメリカ出身のクリストファー・ラビ助教が加わりました。その後、2014年にはレノツ特任講師の後任としてスウェーデン人のニコラス・ベリストロム特任助教が加わりました。
自分の所在地を知っているロボットを作るには
ラビ助教は、工学系研究科の鈴木・土屋研究室に所属している制御研究の専門家で、ベリストロム特任助教は情報理工学系研究科の石川研究室に所属する、コンピュータ・ビジョンの専門家です。両グループは、それぞれの分野で世界を牽引する研究室です。ボーイング社のジョン・ヴィアン主任研究員、イマード・サード主幹研究員と共に、ラビ助教とベリストロム特任助教は、無人機研究という難題に取り組みました。それは、飛行用と陸上用のロボットに搭載可能な堅牢、正確かつ精密なナビゲーションと誘導システムをどのように創るか、という問題です。

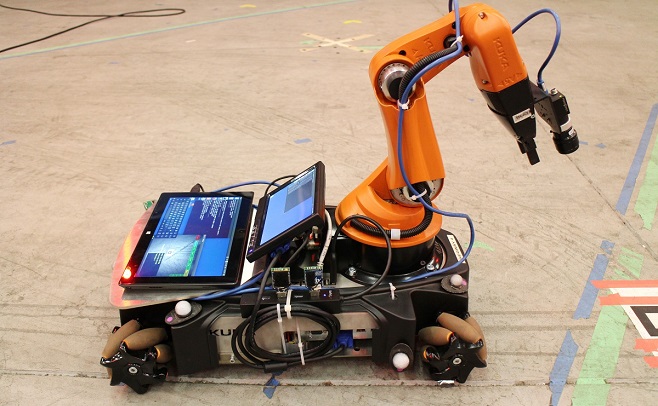
図2:開発したシステムを検証するため、グループは陸上のロボットKuka YouBot のような標準的な開発プラットフォームを用いました。車輪の速度検出装置によってロボットの走行距離が測定できる一方、ロボットのアーム部分に備え付けられたカメラで地形や景色を追跡します。ロボットの本体に付いている白い球体を目印に外部のモーション・キャプチャー・センサーがロボットの動きを追跡します。ロボットに搭載されたセンサーや外部センサーから得られる多様な情報は、ロボットに搭載されたコンピューターにより統合されます。
© 2015 Chris Raabe and Niklas Bergström.
これらの条件を満たすロボット制御のアルゴリズムを開発するという高い目標を設定しました。このアルゴリズムによって、ロボットに搭載されたセンサーと外部センサーから得られるロボットの動作の情報が統合できなければなりません。さらに、一つまたは複数の情報源が失われた場合でも、本体が操縦できるよう、このアルゴリズムは「堅牢」である必要があります。加えて、GPSシステムのように絶対座標系内で「正確」であり、同時に例えば、ロボットに搭載したカメラから得られたデータのような相対的な座標系内で「精密」である必要があります。さらに、環境中の素早い変化に反応し、応答すること、そして、飛行用と陸上用のロボットで動作することが必要です(図 2)。
部分の総和に勝る
「上空で静止する小型無人ヘリコプター(ドローン)は、例えば、小規模な突風や乱流によって目的の位置とは遠く離れた場所に到着する問題があります。このような乱れを素早く検出できるセンサーが必要で、あれば、ドローンは位置を補正できます。さもなければ、ドローンを墜落させかねません。課題は、既存の技術を小さな乗り物にも搭載することのできるプラットフォーム上に実現しつつ、高速な測定と素早い補正も可能にすることでした」、と制御と誘導の専門家であるラビ助教は話します。
コンピュータ・ビジョンの専門家であるベリストロム特任助教は、別のしかし関連のある課題に直面しました。それは、視覚センサーから得られる情報をその他の位置情報とどのように統合して、調和させ、信頼性の高い情報をラビ助教が担当する制御システムに提供するかでした。「いくつかの大きな課題がありました」とベリストロム特任助教は振り返ります。「例えば、視覚センサーやその他のセンサーが搭載されているとします。その他にもロボットを追跡するための外部センサーを用いるかもしれません。つまり、多くの異なる情報源から情報が入力されるのです。さらに、システム内の情報を受信してから反応するまでの時間の遅れは、ロボットの制御性を大きく損なうことにつながります」。
加えて、各センサーは独自の座標系を持っています。ロボットに搭載されたカメラは、カメラが捉えた地形や景色との相対的な関係を推測することができますが、それがどこにあるのかを理解することはできません。カメラ位置の変化を数センチ以内の精度で検出できますが、それは絶対的な位置は不明な場所との相対的な関係にすぎないのです。一方、外部センサー、例えば、部屋に固定されたカメラによって、その部屋内でのロボットの正確な位置を検出できますが、精密さには欠けます。誘導やナビゲーションのアルゴリズムは、ロボットに搭載されたセンサーと外部センサーからの情報を統合することで、ロボットの誘導や制御を可能にします。

図3:シアトルのボーイング社の試験施設。外部の視覚システムによって用いられているカメラの位置は、天井の赤い照明が取り付けられている場所。
© 2015 Boeing Company.
しかし、この外部センサーが遮断または失われた場合、例えば陸上用のロボットが橋のような障害物の下を通過するとき、あるいはセンサーが故障した時、どうなるのでしょうか?「異なる位置情報を融合することに成功したため、一つ、またはそれ以上のセンサーが突然利用できなくなったとしても、残りのセンサーからの情報に頼ることで、正確さと精密性の損失を最小限に抑えられます。最近取り組んでいた大きな課題は、異なる座標系を持っている位置センサーを素早く調整できる融合アルゴリズムを作ることでした。このアルゴリズムを試験し、動作することを確認し、その結果を論文として発表しました」とラビ助教は言います。アルゴリズムの試験は米国シアトルのボーイング社で行われました。ボーイング社のような大規模な研究施設の利用なくしては、このような試験は不可能でした(図3)。
これまでの成果は製造業、消費者向け製品、災害後の探索と救出活動(崩壊した建物など難しい環境でも、ロボットは自分のいる場所を“把握”できるので、例えば建物内に残る被災者の探索への応用が考えられます。)といった民間救助活動などさまざまな領域で応用できるとラビ助教とベリストロム特任助教は考えています。
企業や大学の連携の成果が身近なイノベーションに結実する
産業界と学術界の共同研究の育成に加え、産学連携本部は知識の共有を促進することや、研究室や教室から生れたアイデアを、ビジネスを通して社会へと届ける起業文化を育てることによって、社会に貢献しています。
「教育機能を持たない本部組織の産学連携本部が、アントレプレナーシップ家教育を提供していることは国内の大学でも本学のユニークな点です。2005年度以来「東京大学アントレプレナー道場」を開講していますが、その一例です。起業の仕方、事業計画の書き方、起業に際してのチームビルディング、ベンンチャーキャピタルとの付き合い方などを学生に教えています」と各務教授は話します。過去10年で約1,800名の学生が受講し、70名を超える卒業生が創業に参画しています。東京大学のためのベンチャー投資会社であるUTECは、東京大学から生まれた大学発ベンチャー数十社に投資してきました。
産学連携本部は、文部科学省の助成金によりEDGEプログラムも運営しています。これは、研究者が単に研究をすることを越えて視野を広げるように設計された教育とメンタリングからなるプログラムで、研究者が自ら開発した技術を用いて事業化構想を練り上げることを促します。
産学連携本部主導の試みによって結実した技術の多くが、例えば特許のような形で社会の奥深くに根付いています。しかし、重要なのは、EDGEプログラムやアントレプレナー道場といった活動を通して育まれた、個人間のネットワークやエコシステムです。近年、東京大学発の企業はニュースになっています。ロボティクスチャレンジで予選首位となり、後にGoogleに買収されたロボット企業のSCHAFT(シャフト)もその一つです。またマザーズ市場に上場しているバイオベンチャーのPeptiDream(ペプチドリーム)や東京証券取引所第一部市場上場会社となったバイオベンチャーのEuglena(ユーグレナ)です。この2社は、産学連携本部が提供するインキュベーション施設、アントレプレナープラザで育まれました。
産学連携本部—現代版シルクロードへ
国立大学制度の国立大学法人化に続き、2004年に設置された産学連携本部は2013年4月に、2つのセクションに編成されました。イノベーションに重きをおき、イノベーション駆動型の組織とするためです。各務教授率いるイノベーション推進部、小蒲哲夫部長率いる知的財産部によって構成されています(図4)。
、および東京大学TLOととりわけ密接な3極関係を築いています。")
図4:産学連携本部の組織およびその関係団体
産学連携本部は、東京大学エッジキャピタル (UTEC)、および東京大学TLOととりわけ密接な3極関係を築いています。
© 2015 The University of Tokyo.
将来に目を向けると、産学連携本部がこれまで養成してきたベンチャーマインド、リスク・テーキングの文化、協調の精神のエコシステムによって、先見性のある次世代の若手研究者やビジネスリーダー、社会起業家が育まれるだろうと各務教授は自信をのぞかせます。「アントレプレナーシップ教育は水泳と似ています」と各務教授。「まず、練習を通じて筋肉に記憶させる必要がありますが、体で一度覚えてしまえばあとは一生泳げるようになります。同様に、夢を実現する過程を手助けするのがアントレプレナー道場です。」各務教授の考え方は、「アントレプレナーシップ教育こそ、すべての人が受けるべき基礎的な教育」という濱田純一前総長の見解と一致します。
産学連携本部は、2013年に10周年を迎え、これまでの10年の足跡を胸を張って振り返ると同時に、次の10年で未達の課題に取り組みたいと考えています。高速デジタル・ネットワークと国際協力によって世界の距離が縮まる中、産学連携本部は大学のリソースへの門戸を開くことで、急速に知識の超高速道路となりつつある現代のシルクロードの主要な拠点として東京大学を確立しつつあります。
取材・文:ジョン・アマリ
(本記事は、英文を和訳したものです。)
産学連携本部取材協力(アルファベット順)

産学連携本部 イノベーション推進部部長 各務茂夫教授

産学連携本部 イノベーション推進部 筧一彦プログラムオフィサー

大学院情報理工学系研究科 ニコラス・ベリストロム特任助教(左)
大学院工学系研究科 クリストファー・ラビ助教(右)