PRESS RELEASES

Shuffling robot uses biological muscle to move and spin Two-legged biohybrid robot can walk underwater Research news
GIF of walking robot. This sped-up GIF of the robot underwater shows the legs walking forward, with the muscle contractions being stimulated by electricity. ©2024, Kinjo et al/ Matter
Researchers at the University of Tokyo have created a two-legged biohybrid robot, combining an artificial skeleton with biological muscle, which is capable of walking and pivoting underwater. Typical biohybrid robots can move in straight lines or perform large turns but struggle to carry out finer movements in smaller spaces. This makes them unsuitable for use in areas with many obstacles, such as in search and rescue operations. The new robot can pivot on one foot, enabling it to turn within a small circle. At present, it can only work underwater as the lab-grown muscle dries out quickly when exposed to air, losing effectiveness. However, the researchers foresee that it would be possible to create future iterations which can walk on land, by using thicker muscles with their own nutrient supplies and possibly covering them in artificial skin.
If I ask you to imagine a robot made of living muscle on an artificial skeleton, the striding form of a part human, part machine cyborg may come to mind. But the truth is that we are still just taking baby steps when it comes to creating biohybrid, natural-artificial robots. Building real-life biohybrid robots which can walk like a human, let alone stride or run like one, is a big challenge. Professor Shoji Takeuchi and his team from the Graduate School of Information Science and Technology at the University of Tokyo have taken on this challenge in their latest research.
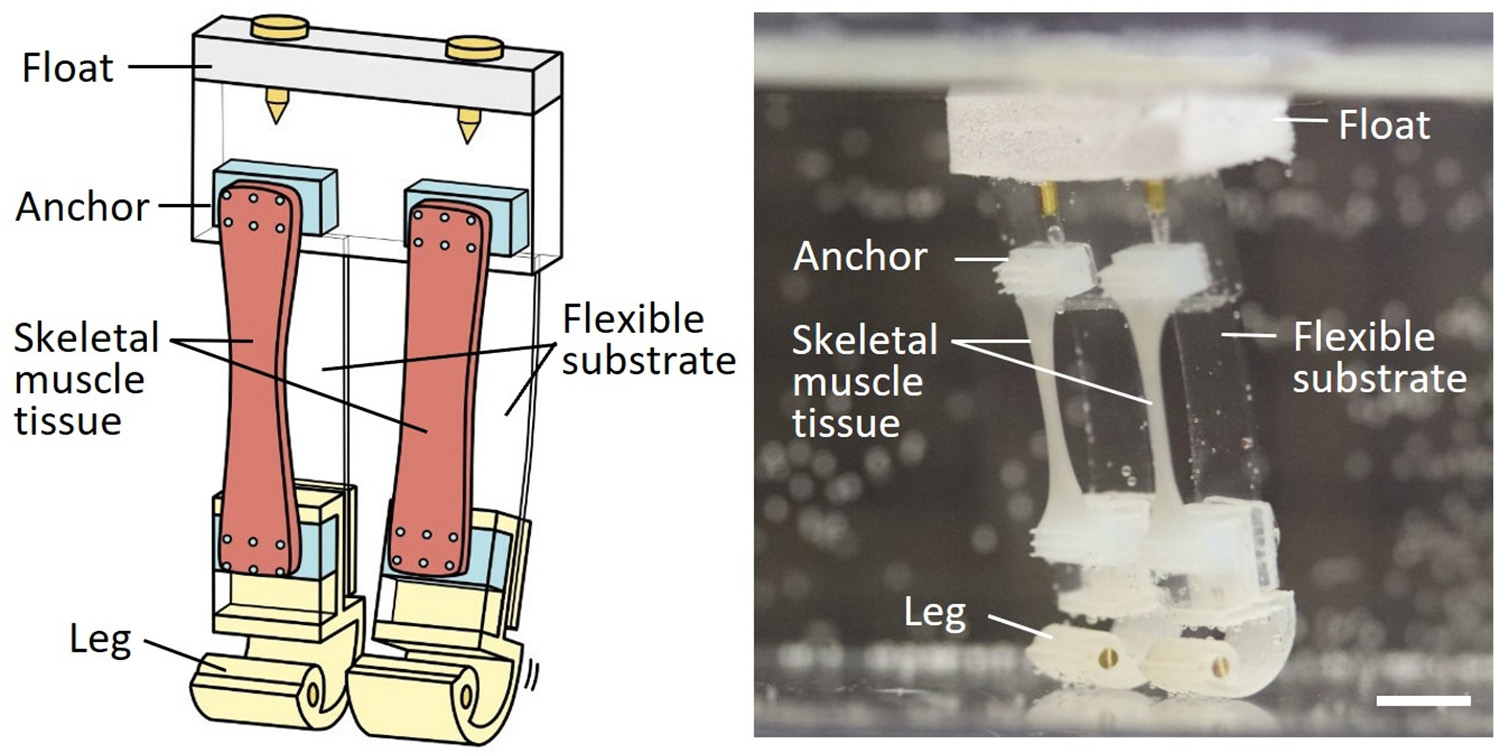
Labeled illustration and image of robot. These labeled pictures show the flexible body of the robot, made from skeletal muscle tissue and a clear flexible silicone substrate, attached to the weighted 3D printed legs and feet. ©2024, Kinjo et al/ Matter
“By incorporating living tissues as part of a robot, we can make use of the superior functions of living organisms. In our latest research, we combined lab-grown skeletal muscle tissue with flexible artificial legs and 3D-printed feet. Using the muscle tissue to move the legs allowed us to create a small robot with efficient, silent movements and a soft touch,” explained Takeuchi.
The researchers began by growing skeletal muscle in molds to create strips. The muscle tissue loses its ability to move when it becomes too dry, so the robot was designed to be suspended in water. The team made a lightweight skeleton from a floating styrene board, a flexible silicone-based body, acrylic resin legs with brass wire weights, and 3D-printed feet. Two strips of muscle tissue were attached from the body to the feet of the robot, completing the legs.
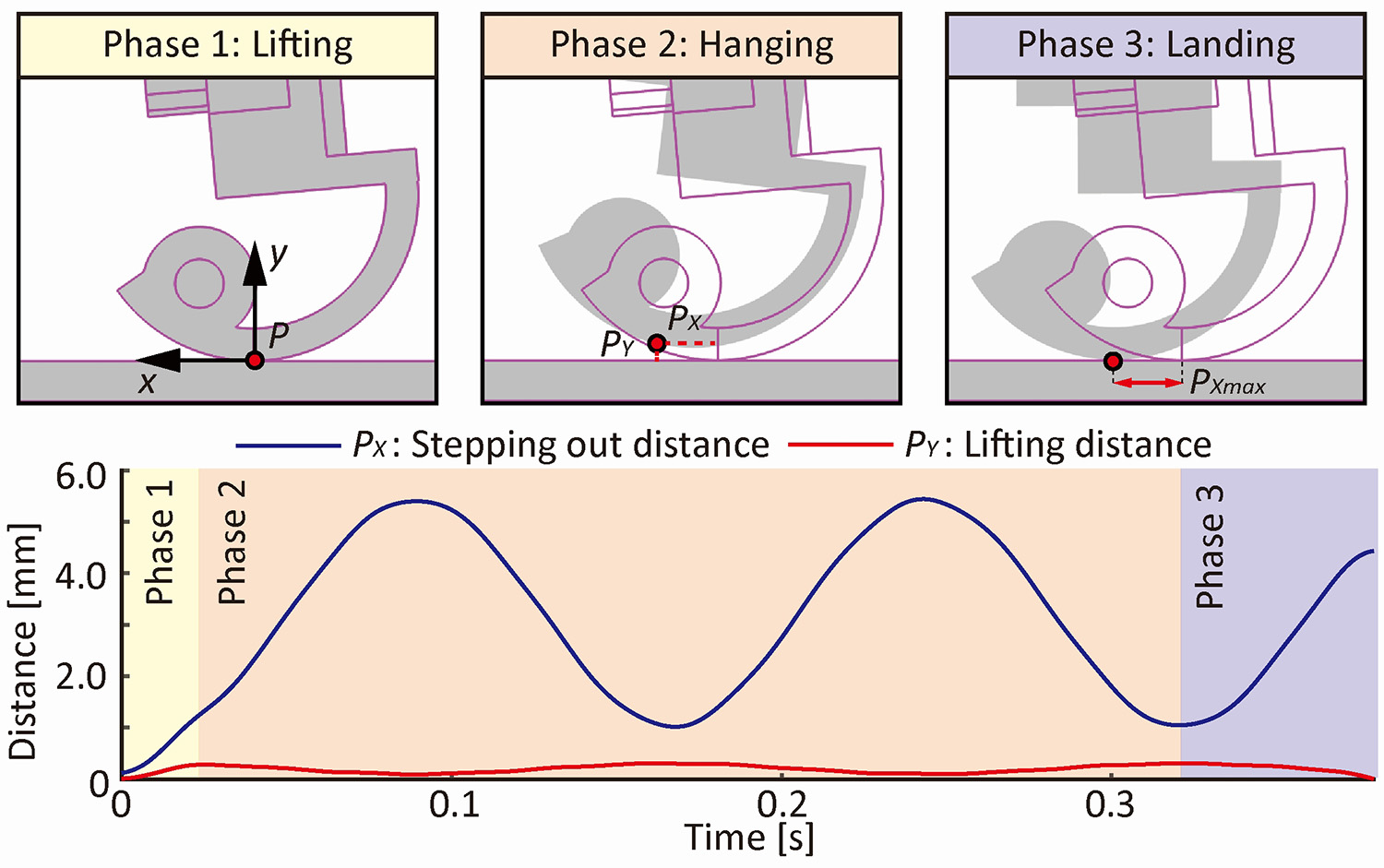
Explanation of walking movement. The top illustrations show the three phases of the robot’s movement: first, lifting the foot; second, the foot hangs suspended; and third, it lands. The graph below shows the distance traveled and time it took for each phase, the longest being the hanging phase. The combination of the three phases leads to one step. ©2024, Kinjo et al/ Matter
Each leg was stimulated using hand-held gold electrodes to deliver a charge, similar to your brain sending electrical signals to your body to move. This caused the muscle tissue to contract and the robot to “walk” when the legs were stimulated one after the other. By stimulating each leg at five-second intervals, they were able to move the robot at a speed of 5.4 millimeters per minute. Although it might not seem particularly fast, the speed of its leg movements was comparable to that of other biohybrid robots.
“Initially, we weren't at all sure that achieving bipedal walking was possible, so it was truly surprising when we succeeded,” said Takeuchi. “Our biohybrid robot managed to perform forward and turning movements with a bipedal walk by effectively balancing four key forces: the muscle contractile force, the restorative force of the flexible body, the gravity acting on the weight, and the buoyancy of the float.”
The team is now considering how to create a smoother-moving robot that can walk on land by developing methods to stimulate the muscles remotely and creating thicker muscles with a nutrient supply to sustain them. Takeuchi said: “We're working on designing robots with joints and additional muscle tissues to enable more sophisticated walking capabilities. Our findings offer valuable insights for the advancement of soft flexible robots powered by muscle tissue and have the potential to contribute to a deeper understanding of biological locomotion mechanisms, further enabling us to mimic the intricacies of human walking in robots.”
Papers
Ryuki Kinjo, Yuya Morimoto, Byeongwook Jo, Shoji Takeuchi, "Biohybrid bipedal robot powered by skeletal muscle tissue," Matter: January 26, 2024, doi:10.1016/j.matt.2023.12.035.
Link (Publication )
)
Related links
- Graduate School of Information Science and Technology
- T Lab
- [Press release, June 2022] “Robot skin heals”
- [Press release, January 2021] “How does your computer smell”