PRESS RELEASES

邪魔しあいながら助けあう両腕 ―両腕を協調させて動かすためのメカニズムを解明―研究成果

「邪魔しあいながら助けあう両腕 |
平成23年11月23日
1.発表者:
横井 惇(東京大学大学院教育学研究科・博士課程2年、日本学術振興会・特別研究員)
平島 雅也(東京大学大学院教育学研究科・助教)
野崎 大地(東京大学大学院教育学研究科・教授)
2.発表概要:
左右の腕をうまく協調させて運動させるためには、それぞれの腕を制御する脳内プロセスが互いに情報を交換しあう必要があるはずです。どのような情報の交換が、この両腕協調運動を可能にしているのでしょうか?我々は、逆説的にも、2つのプロセスが互いに妨害しあうことで、結果として柔軟な両腕協調運動が達成されていることを明らかにしました。
3.発表内容:
<研究の背景>
我々は普段、ビンのふたを開けたり、グラスにビールを注いだり、両手で物を持ち上げたりする際に、それぞれの腕にどのタイミングでどの程度の力を入れれば良いのかを意識的に考えたりはしません。それにもかかわらず、それぞれの手は、あたかもお互いがどのような動作をしようとしているか予め知っているかのように振る舞います。しかしその一方で、お互いの手が邪魔しあうこともあります。たとえば、ピアノの演奏において右手で旋律、左手で伴奏を弾いたり、右手で丸を左手で三角形を描いたりと、左右の手(腕)で異なった運動を同時に行おうとしても、両手が同じように動いてしまってなかなか上手くいかない、という事は誰しも経験したことがあるでしょう。
邪魔をしながらも協調しあうことが可能になる仕組みとは一体どのようなものでしょうか?我々は、この理解の鍵は「運動の学習」にあると考えました。各腕を制御するプロセスは、反対側の腕運動によって生じる力学的影響に応じて運動指令を調節することを学ばなければなりません。実は、このような学習が行われるためには、反対側の腕から干渉を受けることが不可欠なのです。
<本研究のアイデア>極端な例を挙げて説明します。腕運動(左腕を前方に伸ばす運動だとします)が、脳の中にある多数の制御素子の活動によって制御されていると仮定します(図1)。さらに、いくつかの制御素子は、反対側の右腕の運動パターンに応じた干渉を受け、活動することができなくなっているものとします(図1A)。右腕を同時に前方に動かすことによって生じる左腕への力学的な影響は、活動を許された制御素子だけが、学習によってその出力を修正させることによって補償されます(図1B)。この学習の後、右腕を動かす方向を変えるとどうなるでしょう?使われる制御素子が異なるため、せっかくの学習効果は全く発揮されません(図1C)。
ところが、悪いことばかりではありません。右腕を後方に動かすときには、左腕には異なる力学的な影響が加わる状況を考えます。これまで使われていた制御素子が学習に参画できなくなる一方、使われていなかった制御素子によってこの新しい力学的影響が学習されます(図1D)。再度、右腕運動を前方に動かす場合にも、先に学習した学習効果は適切に発揮されます(図1E)。つまり、右腕の運動パターンを変えるたびに、生じる力学的影響を見越して、左腕運動の制御プロセスが運動指令を適切に切り替えることができるのです。一方、右腕からの干渉がない場合(図2A)には、右腕運動方向が変わるたびに全ての制御素子のメモリが書き換えられてしまい(図2B)、右腕の運動パターンに応じた運動指令調節は不可能です。
<本研究で明らかにしたこと>
我々はまず、図1の極端な例のように、個々の制御素子に反対側の腕運動パターンに応じた切り替えが本当に存在するのかどうか、またその切り替えがどのような特徴をもっているのか調べました。図1の例では、右腕を前方に動かしながら獲得した学習効果(図1B)が右腕を後方に動かすときには発揮されない(図1C)ことは、左腕運動制御プロセスの素子の使われ方が右腕方向に依存して切り替わるという特徴(図1A)を反映していました。このように、ある特定の運動パターンで獲得した学習効果が、他の運動パターンを行ったときにどの程度発揮できるか(学習効果の「汎化」と呼びます)を調べることによって、制御素子の切り替わりの有無・特徴を明らかにすることが可能です。
被験者は両手でロボットアーム(注1)のハンドルを同時に前方に動かすよう指示されます。このとき、一方の腕にのみ力場(注2)を加え、この力場の存在下で両腕を真っ直ぐ動かせるようになるまで訓練を行いました。その後、それぞれの腕運動の方向を様々に変えた時の学習効果の汎化量を調べたところ、その汎化パターンは、反対側の腕運動方向が変わるにつれて、制御素子の使われ方が徐々に切り替わっていることを示していました。さらに、汎化パターンの特徴は、反対側の腕運動の情報が制御素子に「掛け算的に干渉」していると仮定した場合の数学的モデルから導かれる予測に非常に良く当てはまっていました(図3)。
理論的研究により、2つの入力情報を掛け算的に統合している制御素子があれば、それらの活動を適宜組み合わせることにより、入力と出力の間の任意の関係を学習できることが分かっています。すなわち、右腕と左腕の間に、それらの運動パターンに応じて様々な力学的影響が生じる状況がある場合、両方の腕の情報を掛け算的に統合する制御素子があれば、脳はこのような素子の活動をうまく組み合わせて、その影響を補償する運動指令を学習できてしまうのです。実際、被験者の左腕に「両腕の運動方向の組み合わせに応じて複雑に変化する力場」を課した実験を行ったところ、被験者はこの力場を容易に学習することができ、その結果は「掛け算的な干渉」を持つモデルによる予測によく一致していました(図4)。一方、両腕運動の情報が「足し算的」に干渉する制御素子を持つモデルでは、このような複雑な力場に適応することはできませんでした(図4)。
本研究の学術的・社会的意義: 本研究の結果は、両腕協調運動を行うには、それぞれの腕運動の制御プロセスが反対側の腕運動情報に掛け算的な干渉を受ける必要があることを示しています。このような干渉の下で、各制御プロセスが運動学習を進行させることにより、結果的に相手の腕運動によって生じる影響を見越した運動指令を獲得・生成できるようになるのです。この新しい両腕協調運動制御のスキームは、両腕運動においてなぜ両腕間の情報交換が必要かについて具体的な根拠を与えると同時に、従来仮定されてきたような、それぞれの腕運動を制御するプロセスの仲を取り持つような付加的な中枢の存在を必ずしも必要としないことを示した点に学術的な意義があります。また、反対側の腕運動を変えることで、腕運動の制御過程に異なった学習を行わせることができるという点で、これを活かした新しい運動スキルの練習方法、リハビリテーション手法の開発にもつながると考えられます。
なお、本研究は、最先端・次世代研究開発支援プログラム(総合科学技術会議、日本学術振興会)の助成を受けて行われたものです。
4.発表雑誌:
雑誌名:The Journal of Neuroscience (2011年11月22日号)
論文タイトル:Gain-field encoding of the kinematics of both arms in the internal model enables flexible bimanual action
著者:Atsushi Yokoi, Masaya Hirashima, Daichi Nozaki
5.問い合わせ先:
野崎大地(東京大学大学院教育学研究科・教授)
6.用語解説:
(注1)ロボットアーム:運動学習研究等に用いられる特殊な装置。被験者がハンドルを握って、PC画面上のカーソルを操るなどの運動課題を行う。このときのハンドルの位置、速度を精密に計測できるとともに、様々な力をハンドルに加えることができる。
(注2)力場:ロボットアームによって産み出される特殊な負荷。本研究では、ハンドル進行方向と垂直な向きに、運動速度に比例した大きさの力をハンドルに加えた。
7.添付資料:
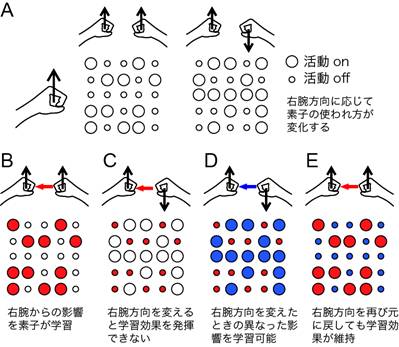
図1:A, 左腕を制御する素子の活動の有無(On, Off)が右腕運動方向に依存する場合の概念。B, 右腕からの力学的影響をOnの制御素子が学習。C, 右腕運動の方向を変えると、この学習効果は発揮できない。D, しかし、右腕運動方向を変えたときの異なる力学的影響は、別の制御素子によって学習される。E, 再び右腕運動方向を元に戻しても、獲得された運動学習効果を発揮できる。
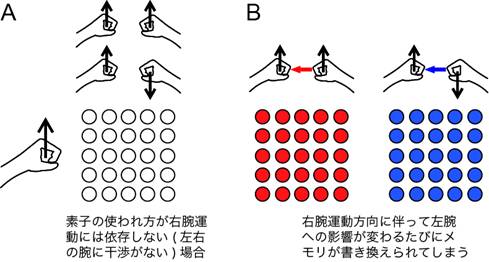
図2:A, 左腕を制御する制御素子の活動が右腕運動方向に依存しない場合。B, 右腕運動方向が変わるたびに、右腕からの力学的影響に関する異なった記憶が制御素子に刻まれてしまう。
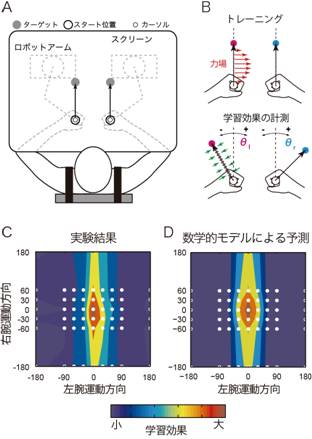
図3:A, ロボットアームによる実験。B, 左腕運動のトレーニングとその学習効果の計測。C, 左腕・右腕の運動方向を変えたときに発揮される学習効果。トレーニングにおける運動方向(両腕とも前方)からずれるにつれて発揮できる学習効果が徐々に低下する。D, 両方の腕の運動方向情報が、制御素子において掛け算的に干渉していると仮定した数学的モデルによる予測。
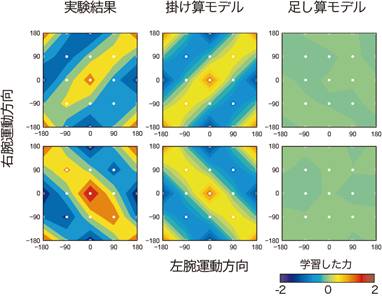
図4:両腕の運動方向に応じて左腕に加わる力場の大きさが複雑に変化する二種類の力場(上段、下段)を学習させた場合の実験結果(左列)、掛け算型干渉モデルの予測(中列)、足し算型干渉モデルの予測(右列)。