犬にまつわる東大の研究
獣医外科学、動物行動学、ロボット工学、
考古学、年代測定学、法学・動物介在学、
獣医疫学、古典文学、現代文学。
9分野の先生に、犬にまつわる研究について紹介してもらいました。
犬とロボット工学
犬型ロボット、トンネルの建設現場で活躍
山下淳
YAMASHITA Atsushi
新領域創成科学研究科教授

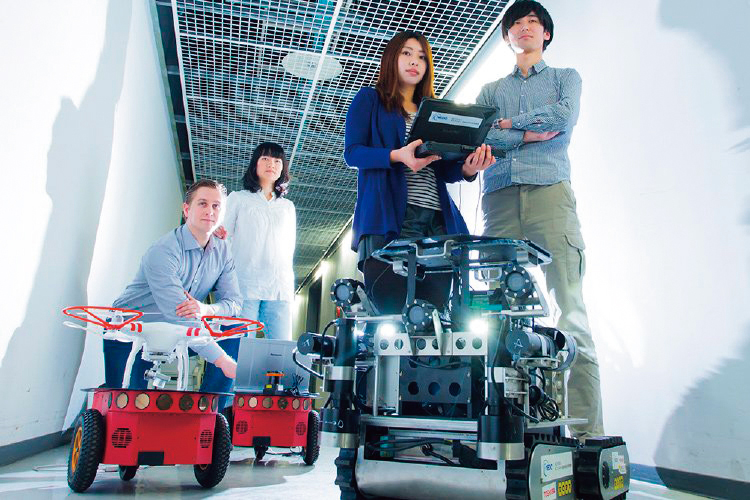
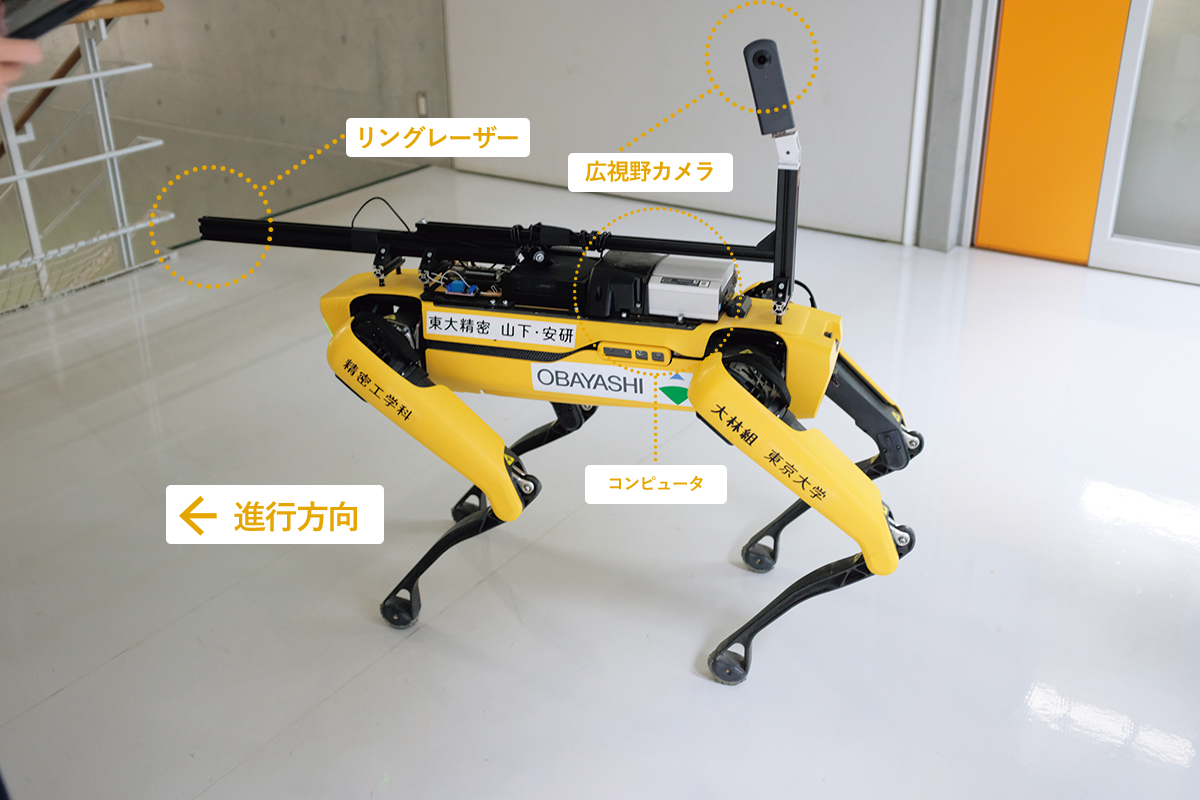
障害物をよけたり、階段の上り下りも難なくこなす犬型ロボット「Spot」。いろいろな場所で使われていますが、山岳トンネルを作る現場でも活躍しています。
ロボットを使った遠隔操作などを研究し、トンネルの計測技術を開発した山下先生の取り組みを紹介します。
ロボット技術で効率的にトンネルの形状を把握
私たちの研究室では、「犬型」として知られる自律四足歩行ロボット「Spot」やドローンを使って、トンネル断面を簡単で高密度に計測するシステムを開発しました。大林組との共同研究です。

山岳トンネルを作るときは、その形状を測定し、設計通りに行われているかを確認する必要があります。これまではアナログ的に、高所作業車やメジャーなどを使ってトンネルの高さと幅を計測してきましたが、当然これには人手も時間もかかります。さまざまな計測機器もありますが、問題は、点と点の距離を測ることはできても、トンネル全ての形状を高密度に計測し、三次元データ化するのは難しいということ。その点に着目し、ロボットや自動化技術を使って複数の断面を連続で効率的に計測できるようにしました。
計測装置には、全方位にレーザー光を飛ばせる「リングレーザー」と超広角カメラを搭載しました。線状のレーザー光をトンネル内壁に照射し、それを撮影した映像を解析することで、レーザー光が当たっているところの三次元のx・y・z座標を計算します。「光切断法」という三角測量の原理を使った、全ての座標を同時に測ることができる手法を採用しています。

計測時間は従来の約30分の1に
この装置を搭載したSpotやドローンを遠隔操作し、角度を変えながら全ての断面をなめるように計測することで、トンネル内面の形状を三次元データにすることができます。ロボットを活用することで、計測時間は従来の約30分の1に短縮できました。
Spotは不整地走破能力が高く、ガタガタな不整地でも問題なく走行でき、障害物も自動的に避けてくれます。操作も簡単で、ゲームコントローラーのようにSpotを動かしたい方向にレバーを倒すだけ。日本の人口が減少していくなかで、トンネルを掘削し、その形を保証するということを継続していくためにも自動化することは重要です。今後はこのシステムを橋梁の点検などにも応用できないかと考えています。
私たちの研究室では他にもロボットを遠隔操作する際に、ロボットの周囲の環境を把握できる三人称視点の映像生成システムや、透視映像技術などさまざまな研究に取り組んでいます。これからも面白く社会の役にも立つ技術の研究に取り組んでいきたいと思っています。