盲導犬と東大

人間の目や耳、そして手足となって働く補助犬。
その一つである盲導犬と視覚障害者の課題解決のための研究が、新領域創成科学研究科を中心に行われています。
公益財団法人日本盲導犬協会 と共同で進めている盲導犬歩行学分野社会連携講座の取り組みと、
と共同で進めている盲導犬歩行学分野社会連携講座の取り組みと、
盲導犬歩行学研究室をハブとして進む盲導犬と視覚障害者のための研究について紹介します。
登場するのは、ゲノム学、バーチャルリアリティ学、情報処理学の分野で活動する3人の研究者です。
10/3(火)公開の前編はこちら
記事を見る2.
VRで盲導犬歩行と視覚障害を疑似体験する
雨宮智浩
AMEMIYA Tomohiro
情報基盤センター教授

盲導犬と歩くとはどんな感じなのでしょうか。
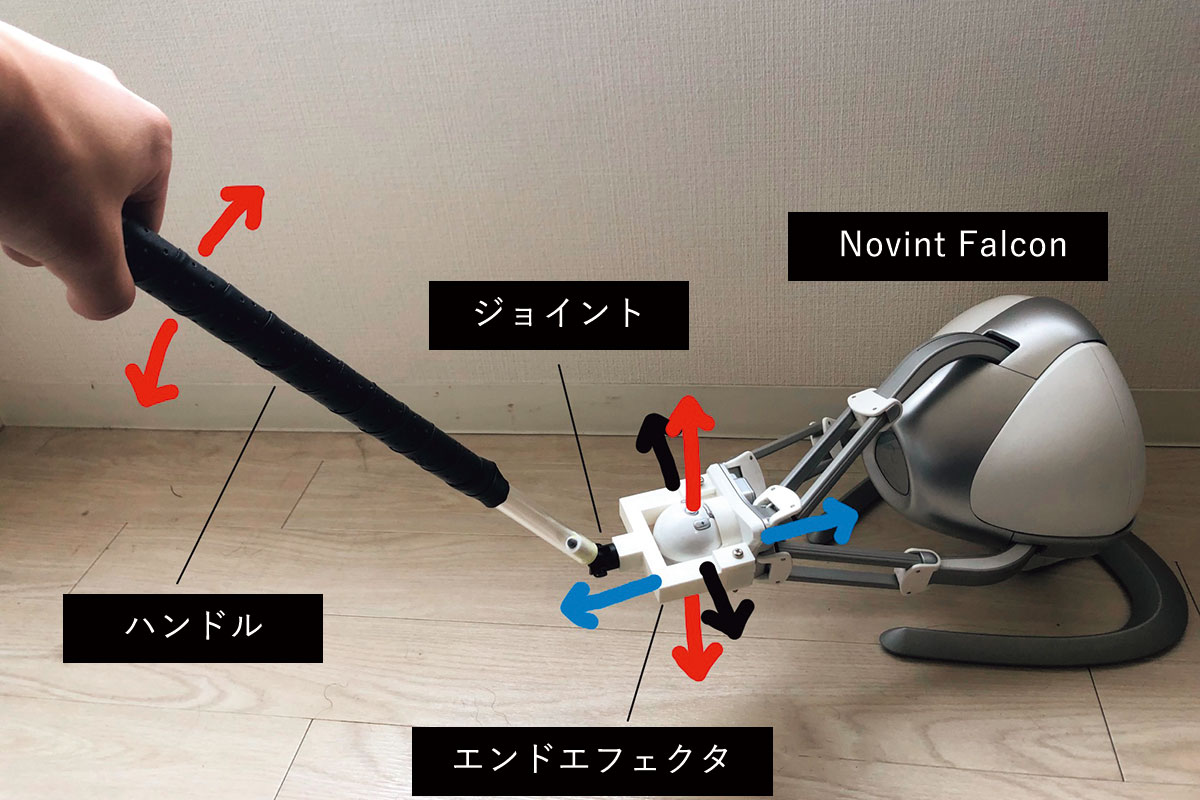
啓発イベントとして盲導犬歩行体験が各地で開催されていますが、実施できる回数やエリアが限られてしまうという課題があります。そこでバーチャルリアリティ(VR)を研究する雨宮智浩先生が開発したのが、VRで盲導犬歩行を体験できるプロトタイプ。専用のゴーグルを装着し、握ったハンドルで犬の動きを感じ、それに身を任せているといつの間にか目的地に着くといった体験ができると雨宮先生は説明します。
体験者が握るハンドルは、ゲーム機などに使われる市販の装置を改造したモーターにつながっていて、このモーターがハンドルの位置を計算して、CGの犬の動きの合わせて引っ張ったり、押し込んだりしてくれます。危険があるときは止まり、横断歩道を渡るときは引っ張ってくれるといった、実際に街中を歩くときの盲導犬の挙動を体験することができるわけです。VR酔いも考慮して、長さは約2分。将来的には盲導犬訓練センターなどに常設し、VRで盲導犬歩行体験をする、ということができればと考えているそうです。

また、雨宮先生は弱視の見えかたを疑似体験できるVRゴーグルの開発にも携わりました。弱視を体験できるような眼鏡も市販されていますが、そこで再現されるのは真ん中だけ丸く見えなくなっているといった典型例のみです。実際には、通常の光量でもまぶしく感じたり、左側だけゆがんで見えたり、視野の一部が欠損していたりと症状はさまざま。
この個人差がある弱視の見え方を、VRを使えばオーダーメイドで再現することができます。眼科医などが見え方を聞き取りながら、VisionPainterというオーサリングシステムにブラシツールを使って描くと、それがVRゴーグルに反映されます。VRゴーグルに装着されたカメラで外の世界を撮影し、弱視の症状と合成することで、見え方を疑似体験することができるのです。ブラシツールを使って描いたものは、コンピューターにキャンバスの絵のようなものとして記録されるので、視覚障害の進行状況などを確認するためにも使えると雨宮先生は言います。
「VRを使う利点の一つは一人称だということ。今見ている映像に、そういった見え方の効果を加えられるので、より自分ごとになります。視覚障害は、教材で学ぶより実際に見ている映像で捉えたほうが、日常的にどういう問題があるのかが分かりやすい。疑似体験をする仕組みとしてとても有効だと考えています」

 (VRセンター)のバーチャル空間にも盲導犬のアバターが。
(VRセンター)のバーチャル空間にも盲導犬のアバターが。3.
候補犬を訓練するプロのスゴ技を継承する
牧野泰才
MAKINO Yasutoshi
新領域創成科学研究科准教授
盲導犬を増やすうえで、重要な役割を担っているのが候補犬の訓練。盲導犬の資質を持って生まれた犬でも、プロの訓練なしには盲導犬としてデビューすることはできません。触覚を研究する牧野泰才先生が取り組んでいるのが、ベテラン訓練士の技術を追体験できるシステム。これを訓練士の育成に役立てられないかと考えています。
日本盲導犬協会で行われている訓練の様子を見学したときに、あるベテラン訓練士のスキルに感嘆したと話す牧野先生。
「不思議なんですが、この訓練士さんに対する犬のリアクションが全然違うんです。例えばワーッと戯れていても、次の瞬間ピタッと訓練モードに入る。どんな性格の犬でも同じ反応でした」
話を聞いたところ、訓練時には犬の動きや眉間の皺の入り方などを見ながら、ハンドルを少し押してみたり、引いてみたりと駆け引きのようなものを繰り返していました。しかし、その力のやり取りは外からの観察では分かりにくく、言語化も難しいことが、技術を訓練生に継承するうえでのハードルになっているとのこと。このテクニックを定量化して、訓練生に伝えられる形にできないだろうか。
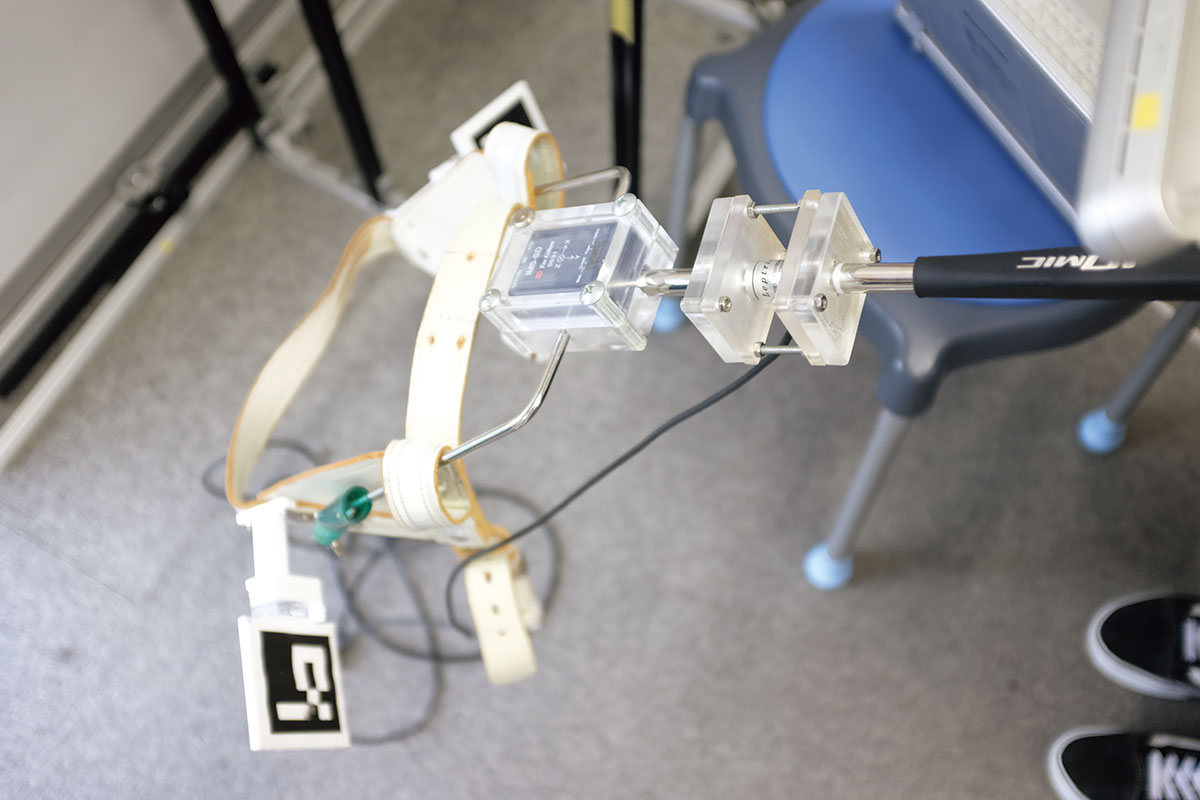
そう考えた牧野先生が取り組んでいるのが、訓練士が犬を訓練しているときのハンドルの傾きや力加減などを可視化してフィードバックすることと、その情報を元に誰でも盲導犬訓練を追体験できる装置の開発です。
「訓練士の方と話してみると、実は熟達した訓練士同士でもお互いにどれくらいの力をどのタイミングで与えているか、正確には分かっていないようなんです」
牧野先生は、その情報を共有できる仕組みがあれば、訓練の効果が高くなると考えました。そこで、センサーをつけたハーネスを盲導犬の胴体につけ、ハンドルの傾きや、犬を進ませようとしているときや止めようとしているときの力加減を測定し、訓練士がその場で確認できるようにして、お互いの訓練の良いところを把握できるようにしようとしています。
また、そのような情報を元に、ベテラン訓練士の訓練時の状況を再現できるプロトタイプを作りました。 2台の装置の根元についたモーターが、ハンドルの傾きと、押す/引くの力加減を再現します。今後は犬の様子が分かるような映像とセットにすることで、よりリアルな体験に近づけようと考えています。
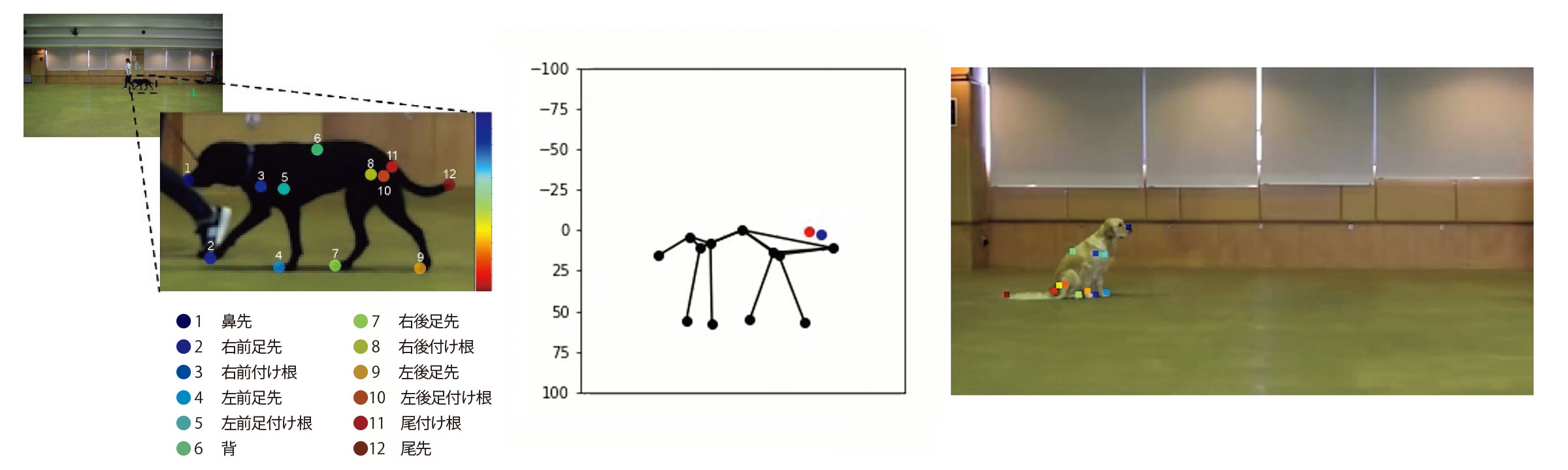
また、訓練する時に大切なのは、犬が集中していること。集中していないときはいくら訓練しても学習効果が少ないそうです。そこで犬の骨格情報を抽出し、その姿勢と集中度の関係を調べたところ、訓練士との距離や犬の鼻先の位置が比較的集中度と相関がありそうだということは見えてきましたが、研究はまだ道半ばだと言います。
触覚を介して人と犬とが意思の疎通を図る盲導犬訓練。触覚の研究者としてこれほど興味深いテーマはないと牧野先生は話します。今後も研究を継続し、盲導犬訓練の質を上げることに貢献したいと考えています。