

Response
Faculty Column: Underwater witness
Toshihiro Maki
Associate Professor, Underwater Technology Research Center, Institute of Industrial Science
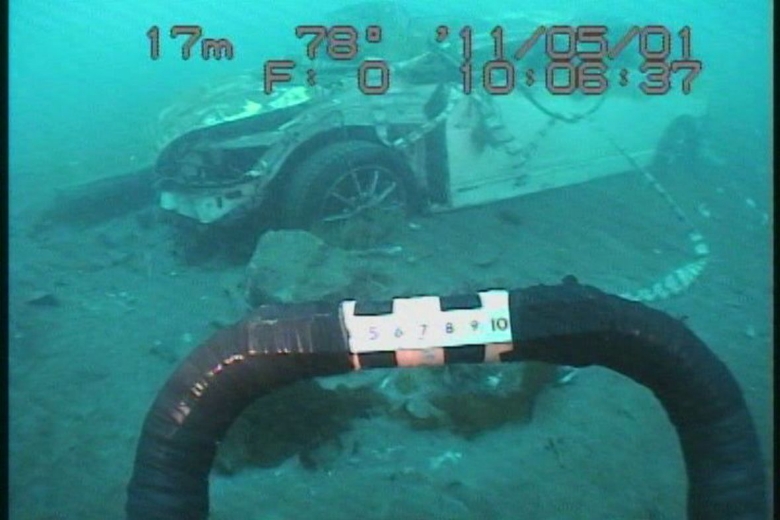
The remains of an automobile found at the depth of 17 meters underwater in Otsuchi Bay. The black bar in the foreground is the bumper of the ROV.
The tsunami of March 11, 2011 devastated towns and swept a lot of the victims and rubble out to the sea. It’s easy to see the land damage over a wide area by taking aerial photos. Aerial photography, however, will not capture anything underwater. Divers dispatched by the Japan Coast Guard have been making underwater investigations, but they can only dive to a certain depth and poor visibility makes it a slow process. Fishermen cannot resume their work until the bodies and rubble are removed from the seafloor and so they are quite keen for the underwater investigations to be successfully completed.

The RTV-100 (owned by Mitsui Engineering & Shipbuilding Co., Ltd.) used in the investigations (foreground) and the RTV-100 MK.II owned by the Earthquake Research Institute of the University of Tokyo (back).
We began making underwater investigations using remotely operated vehicles (ROVs), working in cooperation with the University of Tokyo Ocean Alliance and Mitsui Engineering & Shipbuilding Co., Ltd. as part of the oceanographic program implemented with support from the Nippon Foundation. Specifically we made investigations near the town of Otsuchi in Iwate Prefecture (from April 29 to May 1), near the town of Minamisanriku (from May 15 to 19), and off the Oshika Peninsula in Miyagi Prefecture (from July 5 to 10). The investigations were conducted mainly in areas where the depth was 20 meters or more and it was difficult for divers to reach the bottom. The RTV-100 TV-camera robot that we used in the investigations was provided by Mitsui Engineering & Shipbuilding. It was released on the market in 1984 and has since been widely used for fish bed surveys and dam maintenance inspections. The device, which weighs 30 kg on land and is 80 cm in length, is remotely operated via a cable connected to the ship.
The underwater investigation made near the town of Otsuchi turned up debris from a bridge, four automobiles, school bags, etc. but it was confirmed that there were few large pieces of debris on the seafloor. The visual range was five meters. Living urchins and shellfish were also found. Similar results were obtained in the investigations made off Minamisanriku and the Oshika Peninsula. Heavy debris such as steel frames seemed to have been deposited on the seafloor near the coast while lighter debris such as wooden materials and fishing nets seemed to have been swept further out. In the investigation near the town of Otsuchi, two bodies found off Akahama were passed onto the Japan Coast Guard. One body was found face-down 23 meters underwater and the other body was found in a handstand position 21 meters underwater.
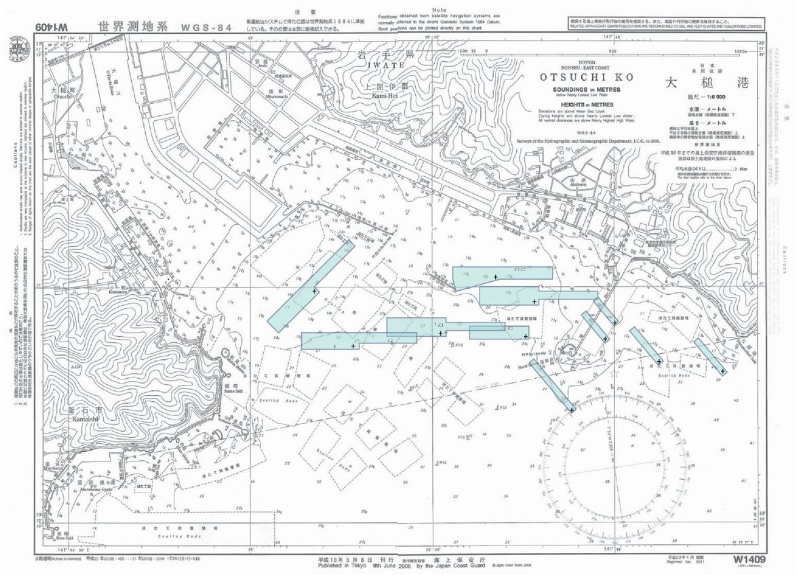
The numbers and light blue areas on the map show the numbers assigned to the underwater investigations and the areas where the investigations were made, respectively.
The underwater investigations have proved the usefulness of ROVs in surveying damage to the seafloor, and local fishermen were very pleased to be given copies of the images captured. Moreover, we were able to demonstrate, even if only slightly, the effectiveness of Japanese-made robots, which following the disaster had been overshadowed by robots made overseas. Despite the progress made, the ocean extends over a vast area and we were able to investigate only in a very small section of it. For example in Otsuchi, we investigated an area of Otsuchi Bay measuring only 40,000 square meters (0.2% of the total bay area) and even this took 18 hours over three days. In order to make underwater investigations of the entire sea area, a system for collecting ROVs from across Japan for deployment where needed is urgently required.