The Moonshot Research and Development Program, Moonshot Goal No.3, "Collaborative AI robots for adaptation of diverse environments and innovation of infrastructure construction."

- 2.8 Physical measurement
- 3.3 Engineering
Keiji Nagatani
Graduate School of Engineering
Project Professor
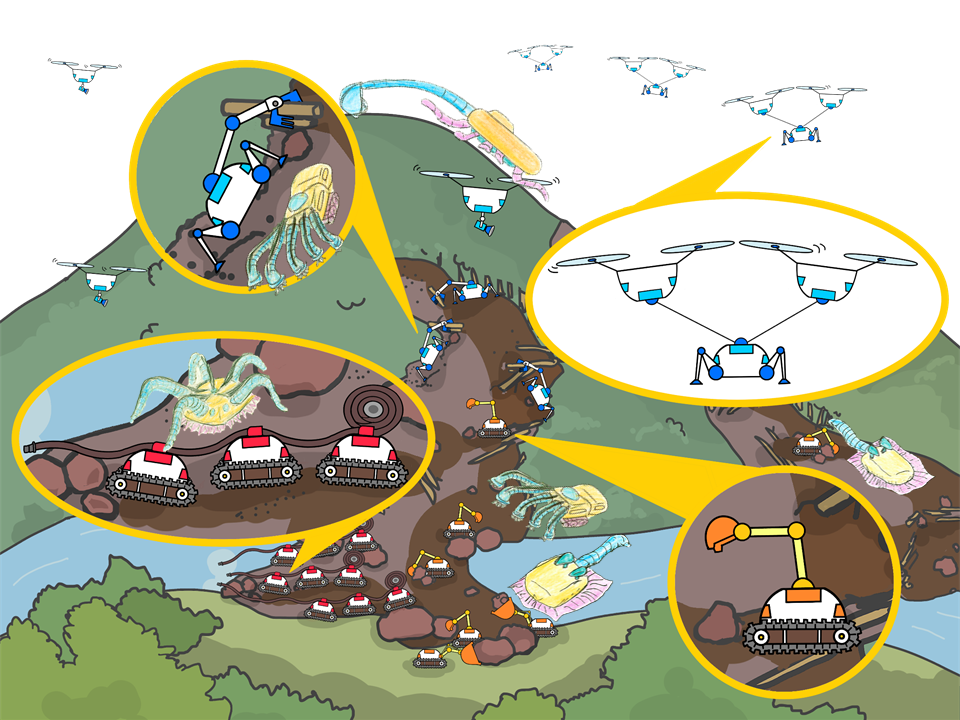
This research project aims to realize a robotic system that can adapt to unrestricted challenging environments and conduct construction of lunar bases or carry out emergency response at disaster sites. To achieve the goal, a prototype of the robotic system will be constructed after which the system's usefulness will be confirmed by field tests in simulated lunar fields and field simulations of river blockages due to landslides by 2025.
Related links
Research collaborators
- Osaka University,
- Tokyo Institute of Technology,
- Kyushu University,
- Keio University,
- Kyushu Institute of Technology,
- Tsukuba University,
- Kogakuin University,
- Nara Institute of Science and Technology,
- Tohoku University,
- Hirosaki University,
- Public Works Research Institute,
- RIKEN,
- Japan Aerospace Exploration Agency,
- Yanmar Holdings Corporation,
- Kumagai Corporation,
- Kokusai Kogyo Co.
Related publications
Nagatani K, Abe M, Osuka K, Chun P-j, Okatani T, Nishio M, Chikushi S, Matsubara T, Ikemoto Y and Asama H (2021), "Innovative technologies for infrastructure construction and maintenance through collaborative robots based on an open design approach", Advanced Robotics., May, 2021. Vol. 35(11), pp. 715-722.
SDGs


Contact
- Construction System Management for Innovation, Institute of Engineering Innovation, School of Engineering, The University of Tokyo
- Tel: +81-3-5841-0359