ムーンショット型研究開発制度 目標3.2050年までに、AIとロボットの共進化により、自ら学習・行動し人と共生するロボットを実現「多様な環境に適応しインフラ構築を革新する協働AIロボット」

- 2.8 物理計測
- 3.3 工学
永谷 圭司
工学系研究科
特任教授
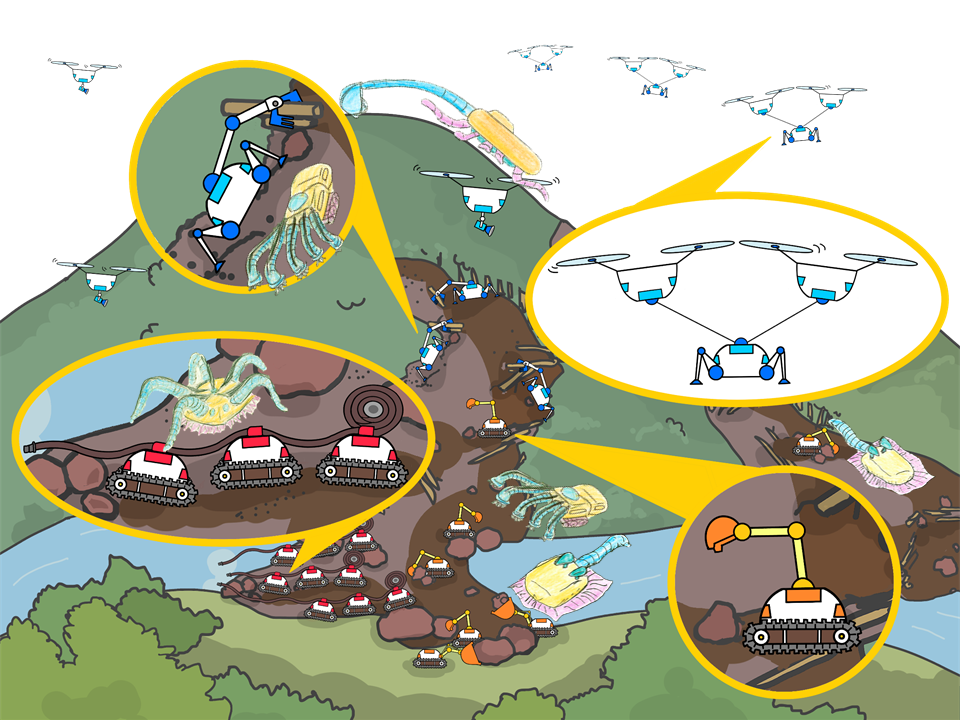
本研究プロジェクトは、月面や災害現場といった実現場という無限定環境に対して適応能力を持つロボットシステムの構築を目標としている.そのため、2025年までに、ロボットシステムのプロトタイプの構築ならびに、月面模擬フィールドでのインフラ構築試験ならびに河道閉塞模擬フィールドでの応急復旧動作試験による,ロボットシステムの有用性の確認を実施する。
プロジェクトに関するURL
共同実施者
- 大阪大学
- 東京工業大学
- 九州大学
- 慶應義塾大学
- 九州工業大学
- 筑波大学
- 工学院大学
- 奈良先端科学技術大学院大学
- 東北大学
- 弘前大学
- 土木研究所
- 理化学研究所
- 宇宙航空研究開発機構
- ヤンマーホールディングス株式会社
- 株式会社熊谷組
- 国際航業株式会社
主な関連論文
Nagatani K, Abe M, Osuka K, Chun P-j, Okatani T, Nishio M, Chikushi S, Matsubara T, Ikemoto Y and Asama H (2021), "Innovative technologies for infrastructure construction and maintenance through collaborative robots based on an open design approach", Advanced Robotics., May, 2021. Vol. 35(11), pp. 715-722.
関連するSDGs項目


問い合わせ先
- 担当: 工学系研究科総合研究機構 i-Constructionシステム学寄付講座
- 電話: 03-5841-0359
- メールアドレス: 永谷 圭司 keiji[at]i-con.t.u-tokyo.ac.jp
※[at]を@に置き換えてください
- カテゴリナビ